Feedforward Systems
- Motor
- Elevator
- Arm


A MotorFeedforward is the baseline feedforward and can be used when there are no external forces acting on the mechanism.
An example of this would be a the robot drivetrain, where the motors only have to fight against friction and inertia.
If your motors are constantly fighting against gravity, an ElevatorFeedforward might be a better option.
// Create the feedforward controller
MotorFeedforward feedforward = MotorFeedforward(MotorFeedforward::Options {
// All these values will need to be tuned to your robot
staticFriction = 1.0f, // <-- Power required to overcome static friction
velocityGain = 1.0f, // <-- Power required to maintain a constant velocity
accelerationGain = 1.0f // <-- Power required to accelerate
});
void opcontrol() override
{
while (true) {
// This is how fast the motor should be moving currently (in/s)
float targetVelocity = 100.0f;
// This is how fast the motor should be accelerating (in/s^2)
float targetAcceleration = 0.0f;
// Calculate the amount of voltage to apply to the motor
float feedforwardOutput = feedforward.update(targetVelocity, targetAcceleration);
sampleMotor.move(feedforwardOutput);
// ...
}
}


An ElevatorFeedforward can be used if there is a constant force applied (such as gravity) throughout the mechanism.
If the force of gravity changes depending on the rotation (such as an arm), you can use an ArmFeedforward instead.
// Create the feedforward controller
ElevatorFeedforward feedforward = ElevatorFeedforward(ElevatorFeedforward::Options {
// All these values will need to be tuned to your robot
gravity = 1.0f, // <-- Power required to overcome gravity
staticFriction = 1.0f, // <-- Power required to overcome static friction
velocityGain = 1.0f, // <-- Power required to maintain a constant velocity
accelerationGain = 1.0f // <-- Power required to accelerate
});
void opcontrol() override
{
while (true) {
// This is how fast the elevator should be moving currently (in/s)
float targetVelocity = 100.0f;
// This is how fast the elevator should be accelerating (in/s^2)
float targetAcceleration = 0.0f;
// Calculate the amount of voltage to apply to the motor
float feedforwardOutput = feedforward.update(targetVelocity, targetAcceleration);
elevatorMotor.move(feedforwardOutput);
// ...
}
}
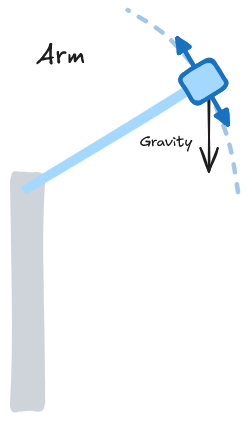
An ArmFeedforward can be used when the force of gravity changes depending on the rotation of the mechanism.
For example, when the arm is all the way down or all the way up, the force of gravity is negated by the mechanism's internal structure. When the arm motor is fully horizontal, the arm motor(s) have to fight against the maximum amount of gravity.
// Create the feedforward controller
ArmFeedforward feedforward = ArmFeedforward(ArmFeedforward::Options {
// All these values will need to be tuned to your robot
gravity = 1.0f, // <-- Power required to overcome gravity
staticFriction = 1.0f, // <-- Power required to overcome static friction
velocityGain = 1.0f, // <-- Power required to maintain a constant velocity
accelerationGain = 1.0f // <-- Power required to accelerate
});
void opcontrol() override
{
while (true) {
// This is how fast the arm should be moving currently (in/s)
float targetVelocity = 100.0f;
// This is how fast the arm should be accelerating (in/s^2)
float targetAcceleration = 0.0f;
// Calculate the current rotation of the arm in radians.
// (0 radians would be fully extended horizontally)
float currentArmPosition = armMotor.getPosition(); // <-- Gets the current encoder ticks
float currentArmRotation = currentArmPosition / 300.0f * 2 * M_PI; // <-- Converts encoder ticks to radians
// Calculate the amount of voltage to apply to the motor
float feedforwardOutput = feedforward.update(targetVelocity, targetAcceleration);
armMotor.move(feedforwardOutput);
// ...
}
}