Control Loops
What are control loops?
Control loops are the secret sauce that separate the good robots from the great robots. These define the predictions being made when a robot moved autonomously and how we can use them to our advantage.
Open Loop (Feedforward)
An open loop is a control system that works independently without the use of sensory feedback. It typically uses a prediction or "model" of what should happen to make reasonable assumptions.
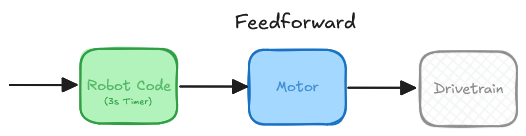
An example of an open loop control is driving forward for 3 seconds. It is reasonable to assume the robot would end up a certain distance forward than it started with. The exact distance can vary depending on how fast the robot moves, how charged the batteries are, etc.
Closed Loops (Feedback)
A closed loop is a control system that is dependent on sensory feedback to adjust itself.
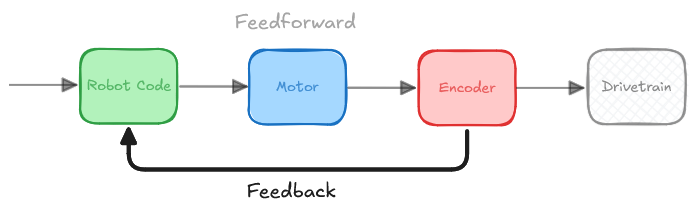
An example of a closed loop control is driving forward until the wheels have rotated 10 times. In this case, the robot should drive approximately the same amount of distance every time.